The ideal handling bicycle
Back in the early days of my framebuilding career, mostly in the 1960s; I was experimenting with head angles, fork rake, and trail.
It was in the days before electronic calculators, and computers, so I kept track of my progress with a graph drawn by hand on squared graph paper.
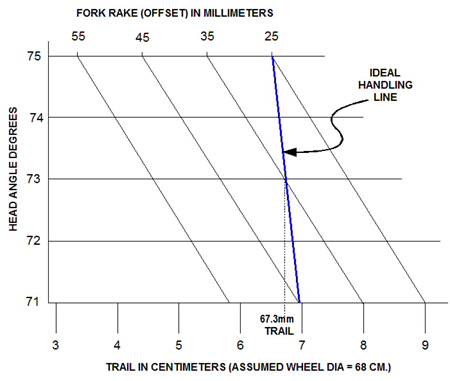
It looked something like the graph above, only it would have been in inches rather than centimeters. Today there are online trail calculators available.
 Trail not only gives a bike stability and keeps it tracking on a straight line, but also gives it self-steering qualities.
Trail not only gives a bike stability and keeps it tracking on a straight line, but also gives it self-steering qualities.
When you lean into a corner, the bike will for the most part steer itself around the bend.
Because the bike and rider are leaning, the rider’s weight is being pushed outwards and downwards by centrifugal force, thereby actually pushing the tires down onto the road, which increases traction.
However, there is an optimum amount of lean, too much and the bike will slide out from under the rider. Therefore there is an optimum trail, if a certain amount of trail is good, more trail is not necessary better.
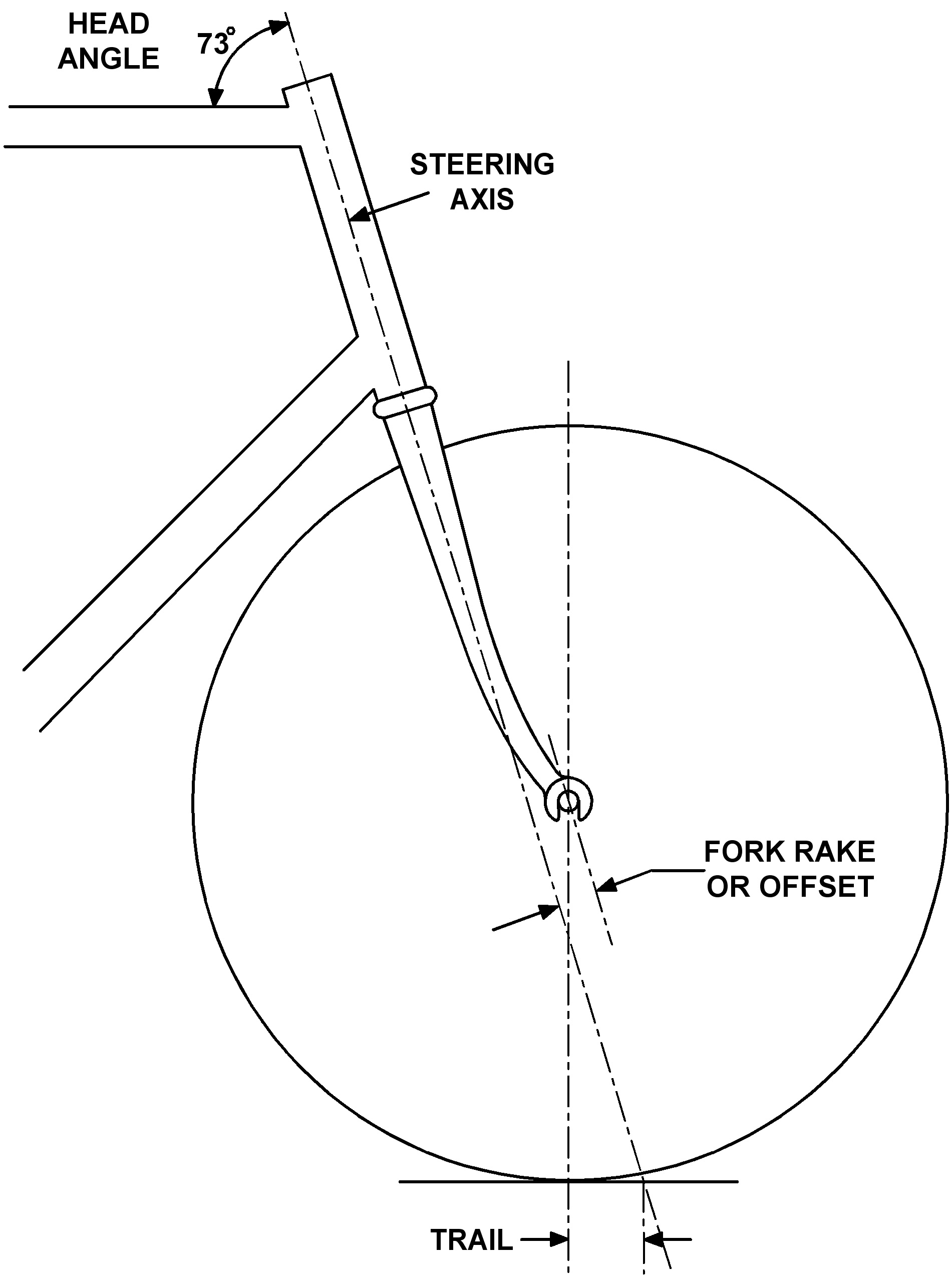
The amount of trail is not the same throughout a range of different head angles. The steeper the head angle the more sensitive the steering, therefore less trail is needed to have the same effect as it would on a bike with a shallower head angle.
In time I found there was an “Optimum Handling” line that I could draw on my graph, that would show me the fork rake needed for a given head angle.
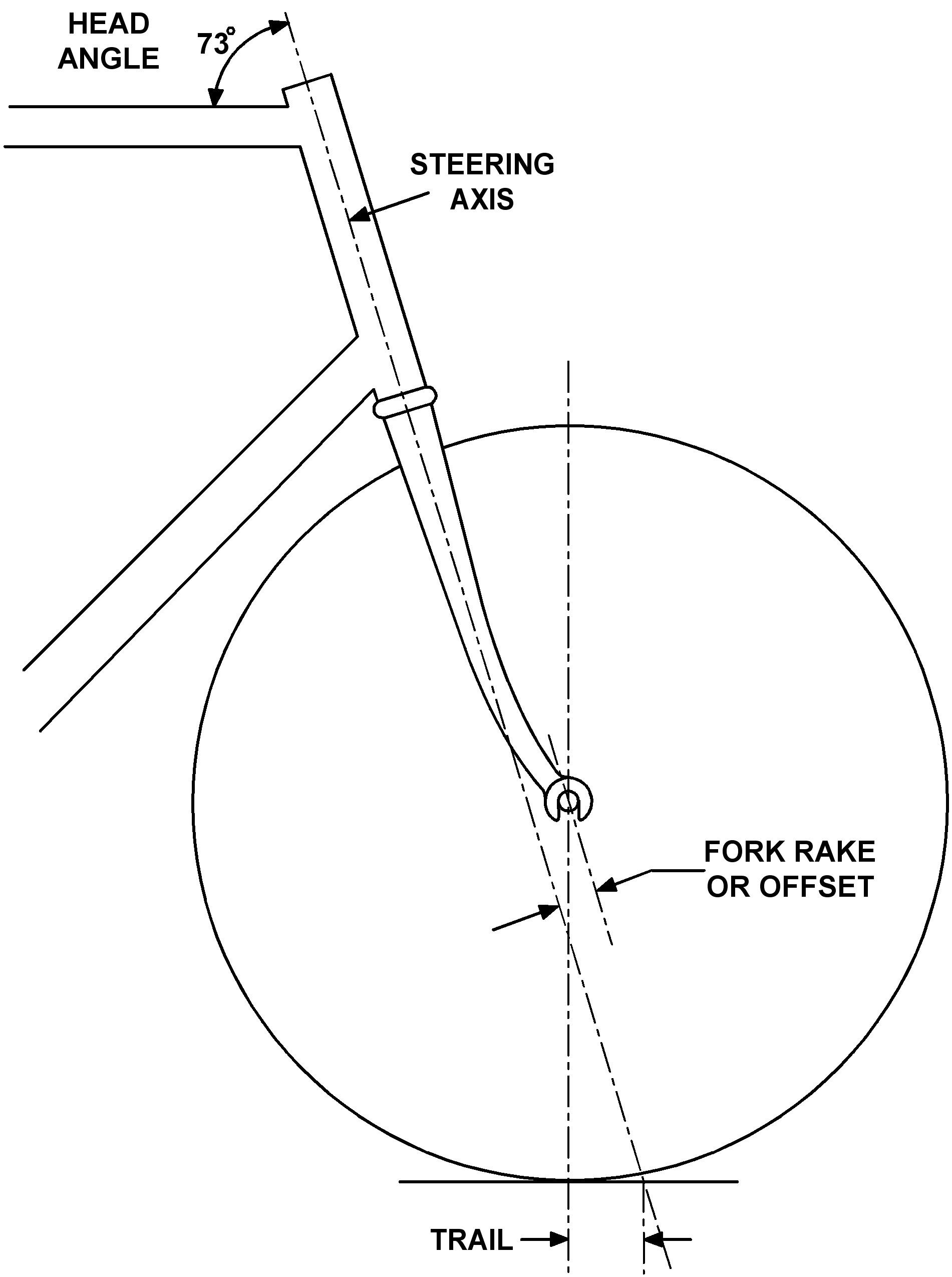
Reading vertically down from where the fork rake line crosses the head angle line shows the amount of trail. As you will see, steeper angles, less trail; shallower angles, more.
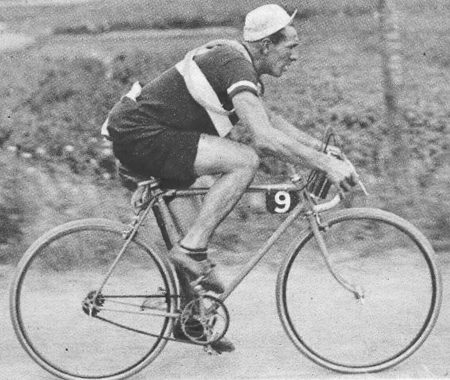
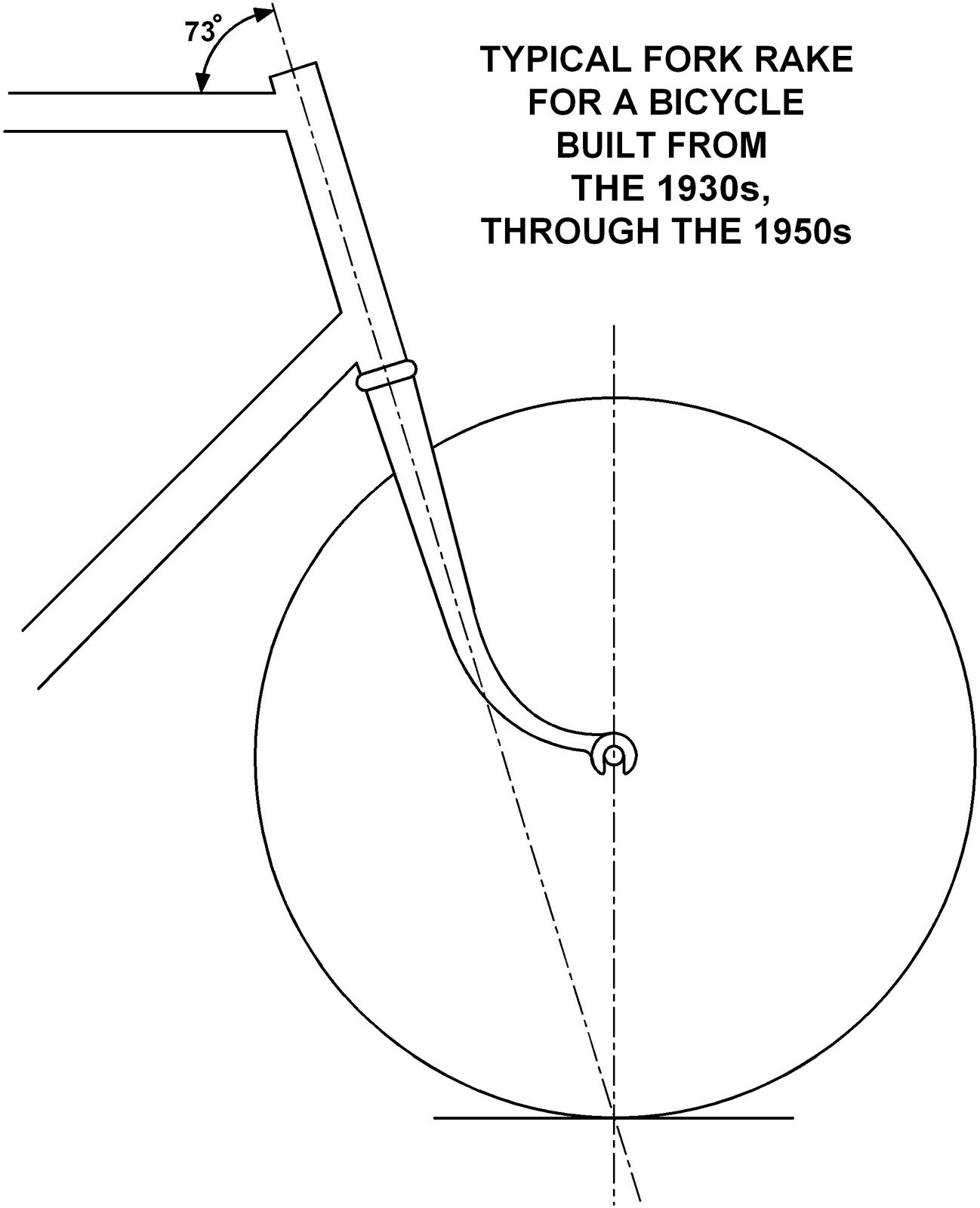
The example shown 73 degree head, 35 mm. fork offset, and 67.3 mm. of trail, was my standard road geometry on the John Howard, Fuso, and Recherche frames I built.
I would build a track bike with a steeper head angle (75 degrees, 25 mm. rake.) making for more sensitive steering because it is designed to be ridden on a banked velodrome.
The banking has the effect of riding in a straight line, not cornering like a road bike. The rider needs a bike that he can physically steer around an opponent in a quick move.
Also in the event of another rider falling in front of him, he needs to be able to change direction in an instant. This was also my thinking, when I built a criterium frame with a 74 degree head, and 30 mm. of fork rake.
However, my standard road geometry gave this same ability to lean into a corner, let the bike take you round, but if you needed to correct your line, or steer around an obstruction, you can physically steer the bike by turning the bars, and pointing the bike in the direction you need to go.
I have said before, my bikes had a little more trail than most others built back when I was building, and more than on bikes produced today. That is not to say I am right and all others are wrong, it is just my design philosophy is different.
Also the handling qualities of a bike do not depend on the steering geometry alone; it is the design of the whole frame, weight distribution, etc., etc.
When I recently rode a carbon fiber bike I bought for my wife, I liked the way it rode, but the steering was different. Not bad, nothing I could put my finger on, or nothing that I could not get used to, given time.
My philosophy has always been, build a good handling bike; put a novice on that bike and he becomes an adequate bike handler. Put an experienced bike rider on the same bike and he becomes a brilliant bike handler





 Dave Moulton
Dave Moulton