
















The ideal handling bicycle
Back in the early days of my framebuilding career, mostly in the 1960s; I was experimenting with head angles, fork rake, and trail.
It was in the days before electronic calculators, and computers, so I kept track of my progress with a graph drawn by hand on squared graph paper.
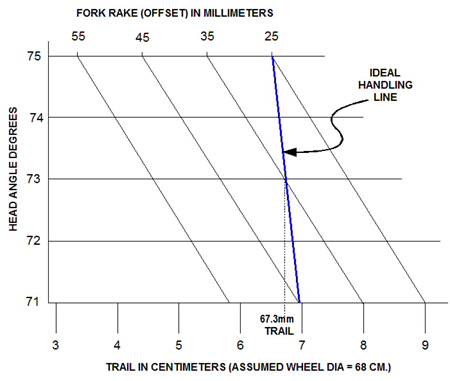
It looked something like the graph above, only it would have been in inches rather than centimeters. Today there are online trail calculators available.
 Trail not only gives a bike stability and keeps it tracking on a straight line, but also gives it self-steering qualities.
Trail not only gives a bike stability and keeps it tracking on a straight line, but also gives it self-steering qualities.
When you lean into a corner, the bike will for the most part steer itself around the bend.
Because the bike and rider are leaning, the rider’s weight is being pushed outwards and downwards by centrifugal force, thereby actually pushing the tires down onto the road, which increases traction.
However, there is an optimum amount of lean, too much and the bike will slide out from under the rider. Therefore there is an optimum trail, if a certain amount of trail is good, more trail is not necessary better.
The amount of trail is not the same throughout a range of different head angles. The steeper the head angle the more sensitive the steering, therefore less trail is needed to have the same effect as it would on a bike with a shallower head angle.
In time I found there was an “Optimum Handling” line that I could draw on my graph, that would show me the fork rake needed for a given head angle.
Reading vertically down from where the fork rake line crosses the head angle line shows the amount of trail. As you will see, steeper angles, less trail; shallower angles, more.
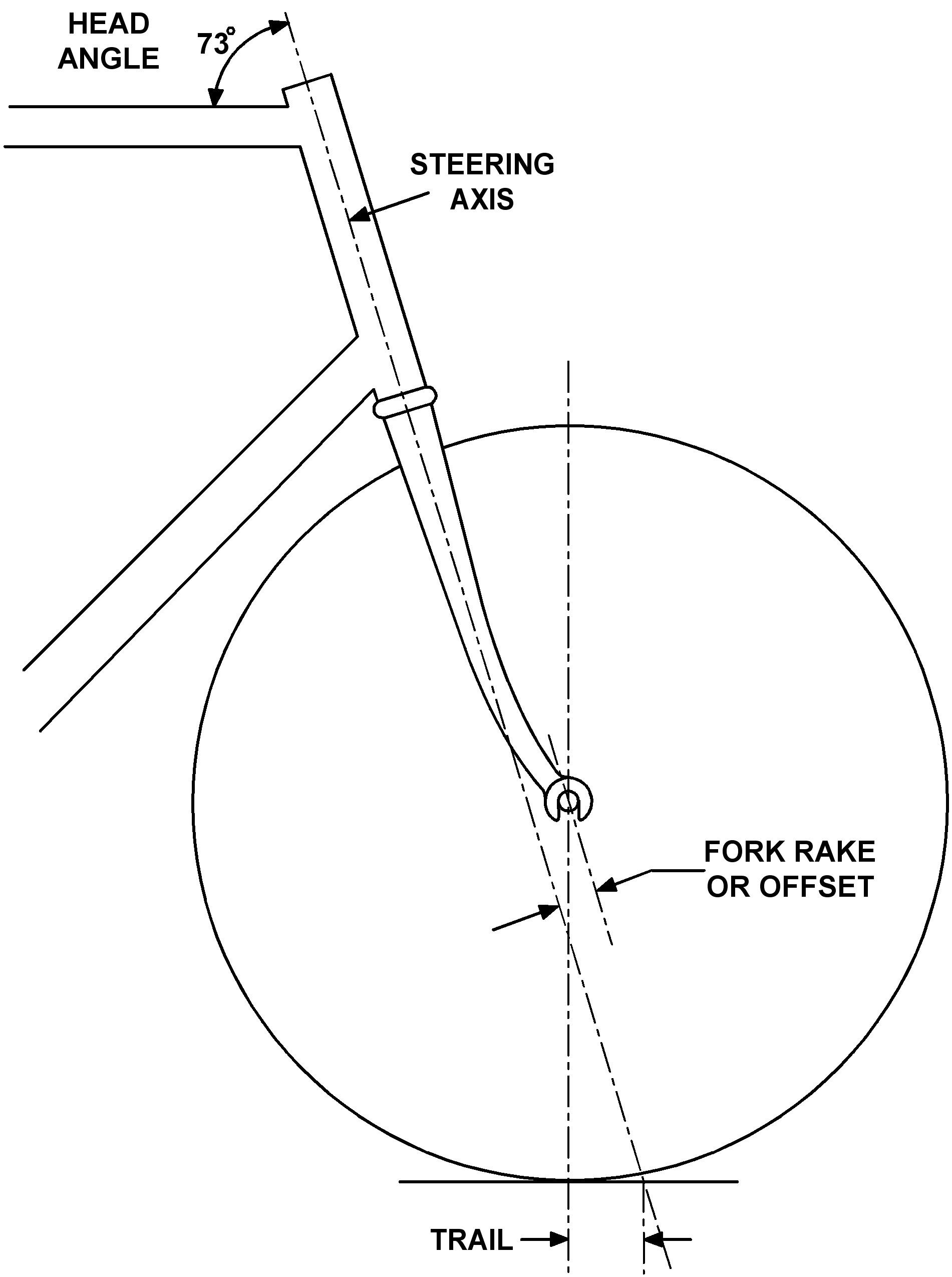
The example shown 73 degree head, 35 mm. fork offset, and 67.3 mm. of trail, was my standard road geometry on the John Howard, Fuso, and Recherche frames I built.
I would build a track bike with a steeper head angle (75 degrees, 25 mm. rake.) making for more sensitive steering because it is designed to be ridden on a banked velodrome.
The banking has the effect of riding in a straight line, not cornering like a road bike. The rider needs a bike that he can physically steer around an opponent in a quick move.
Also in the event of another rider falling in front of him, he needs to be able to change direction in an instant. This was also my thinking, when I built a criterium frame with a 74 degree head, and 30 mm. of fork rake.
However, my standard road geometry gave this same ability to lean into a corner, let the bike take you round, but if you needed to correct your line, or steer around an obstruction, you can physically steer the bike by turning the bars, and pointing the bike in the direction you need to go.
I have said before, my bikes had a little more trail than most others built back when I was building, and more than on bikes produced today. That is not to say I am right and all others are wrong, it is just my design philosophy is different.
Also the handling qualities of a bike do not depend on the steering geometry alone; it is the design of the whole frame, weight distribution, etc., etc.
When I recently rode a carbon fiber bike I bought for my wife, I liked the way it rode, but the steering was different. Not bad, nothing I could put my finger on, or nothing that I could not get used to, given time.
My philosophy has always been, build a good handling bike; put a novice on that bike and he becomes an adequate bike handler. Put an experienced bike rider on the same bike and he becomes a brilliant bike handler





 Dave Moulton
Dave Moulton
Reader Comments (11)
Very interesting Dave - can you comment on this?
I have always ridden bikes with 'race geometry' i.e. around 73 deg head angle though I don't know about fork offset and resulting trail.
I recently built a bike with 'touring geometry' i.e. 71.5 deg h/a, 45mm fork offset giving a trail of 62.9mm, which I'm guessing is more than I've been used to.
The bike rides and handles fine in the main but I have no confidence in riding it hands-off, something I've always done with aplomb for caping up etc. I've eliminated headset and cable problems - any comment?
Kenem,
Often when you have a very shallow head angle with extra trail. (For an extreme case, think of a chopper motorcycle with the exaggerated shallow head angle.) The front wheel falls over sideways under its own weight. I have always referred to this as wheel flop, however, reading other explanations of wheel flop I think some mean something entirely different.
Dave
Your knowledge astounds me. I love reading your blog because every single time I go away learning something.....it's so good to have someone with your experience in the blogging community.
Cheers.
Darryl
This explains why I can ride all day with hands off the bars on my fuso, but not on my c40 which seems to get a little sketchy. I've always wanted to move my exact fuso geometry to a new carbon bike. ;)
Your blog is really excellent. I have commented here a few times anonymously.
Is there an accurate way to measure the trail of a bicycle?
I generally ride a Rivendell bike as my commuter, which is supposed to be a "high trail" bicycle. I like a bicycle that has "slow" steering, not twitchy. For my commuter bike, I carry a small load an a front rack, and I really like how the bike handles. I have experimented with putting the load on a back rack, and I feel that the bike rides better when climbing when the load is on the front. A lot of this, I realize, is very subjective.
I am a tall person, my Rivendell bike has a 66 cm. frame. I have never been good at riding no-hands, but on this bicycle I can do it a bit. Is that related to trail?
I also ride a Ciocc ( Italian ) road bike, from some time in the early 90's, which looks to have a steeper head angle. The bike handles great, differently than my commuter bike; but I find I adapt to it in a few seconds.
I have read about lower trail bikes, and the supposed advantages of them, but never ridden one that I know of.
I have been curious about measuring the actual trail on my bicycles but I don't know how to do it in a reliable way.
@Anon June 4 : Measuring trail of an existing bike...how do you do it? I'm thinking pumping up the air pressure really high, marking off the contact patch on the ground, then taping a point laser light along the steering axis on the headtube and measuring the distance between the laser and the contact patch.
If you want to measure rake "accurately", I would invest in a digital protractor. They can be handy in situations like this.
Good post Dave. Bookmarked!
-Ron
Cozy Beehive
www.twitter.com/cyclingbee
So you are saying that a Head Tube that's 74 degrees with a fork offset of 30mm would handle different than one with 72 degrees and a 44mm offset even though they both have a trail of 67mm? I am trying to understand frame building and geometry better.
Thanks
Dave,
I'm in the midst of drawing up and building my first frame (a new expression of my love for bikes). Can you name maybe the top rookie mistakes? I find myself in the realm of paralisis by analysis.
Keith
Dave,
Your comment about centrifugal force pushing the tires down onto the road is mistaken. Centrifugal force is perfectly parallel to the pavement and the lean angle of the bike cannot change this.
Andrew Dressel
Dave, most sources say that 56 mm is optimum for neutral handling, but you're proposing about a cm more. Could you say more about why you like long trail bikes?
I'm asking because I have a frameset with a 71 deg. head and a 60 mm rake to make up for it. A more typical offset would put it near your sweet spot. I might try it if it doesn't handle the way I want it to, but I'd like to understand more before I put in the money and effort.
Thanks.
Hello Dave: Looking at your graph my '15 Z85 with its 72.5 head angle would ideally have a trail of about 68 which accords with a offset closer to 35 than 45. What riding characteristics might we predict given that the offset is actually 45?